从黑盒到全栈:拆解地平线HSD端到端架构的底层逻辑
2019年入行时,行业对智能驾驶的理解还停留在ACC+车道保持的阶段。五年后,当我再次审视15万级市场,发现格局已被彻底颠覆。风云T9L预售当日,我第一时间梳理了地平线HSD的技术脉络,发现一个核心事实:这不是一次普通的供应商合作,而是一次架构层面的范式转移。
传统智驾的架构困境
业界长期存在一个隐性矛盾——感知、决策、控制模块的割裂。传统方案中,传感器收集数据,经算法处理后生成驾驶决策,最后由控制器执行。这条链路存在天然延迟,就像交响乐团隔着玻璃窗演奏:每个声部都很优秀,但合奏时总有杂音。反映到用户体验上,就是加塞时的犹豫、弯道中的顿挫、匝道并线时的生硬。问题的根源不在于单个模块的性能,而在于模块间信息传递的损耗。
端到端架构的技术突破
地平线HSD采用一段式端到端架构,本质上是将上述链路压缩为单一神经网络。输入端为原始传感器数据,输出端直接对应驾驶动作。中间过程不再有显式的规则判断,而是通过大规模数据训练,让系统学会「像老司机一样思考」。这种设计的好处显而易见:信息损耗趋近于零,响应延迟大幅降低,驾驶风格更接近人类直觉。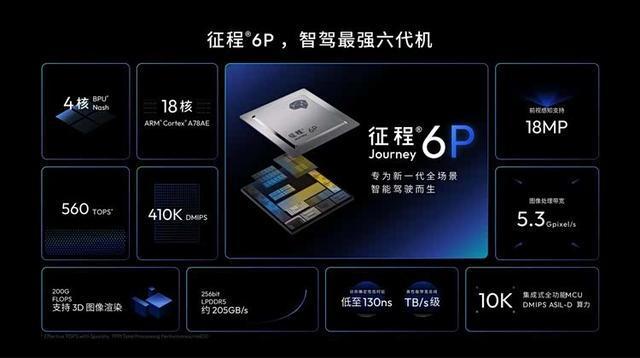
征程6P芯片的定制化设计
支撑这一架构的硬件基础是征程6P芯片,560TOPS算力配合第三代BPU纳什架构。这里有个关键技术细节:该芯片专为Transformer大模型优化,而非通用计算场景。这意味着芯片设计之初就考虑了Transformerattention机制的访存特征,通过硬件级加速让大模型在车端高效运行。这不是算力的简单堆砌,而是针对智驾场景的定向优化。
软硬协同的工程落地
地平线的核心竞争力在于「软硬协同」模式。传统供应商提供黑盒方案后,调校工作由主机厂独立完成。HSD则从芯片架构、算法框架到功能定义形成完整闭环。这套方案已落地四款量产车型,适配周期大幅缩短。对主机厂而言,这意味着更低的开发成本和更快的迭代速度;对消费者而言,这意味着技术红利的快速下放。
对15万级市场的意义
过去高阶智驾是30万+车型的专属标签,原因在于研发成本摊薄和供应链议价能力。风云T9L将HSD拉入15万区间,本质上是通过规模化量产摊薄研发成本,同时验证了地平线技术方案的通用性和可复制性。这一路径与当年旗舰芯片下放千元机的逻辑如出一辙——当技术成熟度跨越临界点,普惠就会成为必然。

